Spherical Robot is teleoperated ball-shaped mobile rolling robot with all electronics inside. It is equipped with an onboard Pan-360 vision system that provides visual feedback which is then transmitted to the operator thereby enabling better control of the robot’s movement. A manually operated spherical robot has been designed that provides visual feedback for reconnaissance and search. The design of the robot can be easily modified to add sensors for collecting application-specific information to the operator. This work was carried out under the guidance of Prof. Leena Vachhani at NCETIS IIT Bombay.
SKILLS INVOLVED
ROS & ROS plugins.
C++ & Python.
Motion planning & control algorithms.
Embedded Control Devevlopment.
Robotics Product Development.
Design in Solidworks & Fabrication.
Rapid Prototyping.
MATLAB Multibody simulation.
Sensor Interfacing.
PCB designing and prototyping.
3D Printing.
Gazebo, RViz
Troubleshooting real robot hardware
SPHERICAL ROBOT
Spherical robots are non-holonomic rolling robots that have advantages compared to 4WD robots to manevoure in cluttered indoor environment. The spherical robot has yoke having actuator that drives the robot ahead with pendulums to steer with shift of CoM.
DESIGN AND DEVELOPMENT
My research involved developing a novel palm-sized robot that has ergonomic design. Focused in developing compact spherical robot that can be easily deployed. I contributed in rapid prototyping of the robot. Spherical robot has symmetric body and CoM plays a crucial role. Designing a robot considering its CoM to lie on a calculated co-ordinate involved in numerous iterations and prototyping. Design was developed in SOLIDWORKS and to understand its motion it was simulated in MATLAB Multibody Simulation (Simmechanics).
CONTROL SOFTWARE DEVELOPMENT
Developing software to integrate all elements. Along with sensor interfacing such as IMU and encoders. Worked on embedded control algorithms to reduce wobble of spherical robot and for position and velocity control of actuators. Contributed to a ROS package for spherical bots. Validated feedback control algorithms with ground truth from VICON Motion capture systems.
REAL ROBOT HARDWARE
Spherical robot investigations included great extent of experimentation, testing & on field deployments. Worked on deployments with real robot hardware and its troubleshooting. Furthermore investigated in fabrication of polycarbonate Hull (outer shell) and its design analysis.
Spherical Robot in NEWS
Published in TIMES OF INDIACheck it here
Glad to be the key contributor to the project.
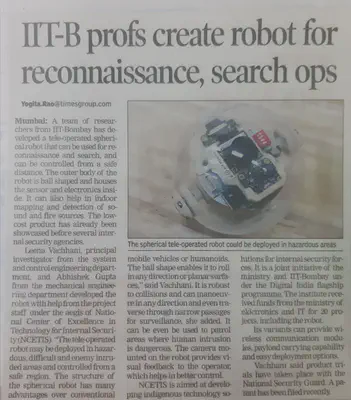
 Spherical robot in action
Spherical robot in action